
Surveyor

The programs are available as a single or as a discounted multi-user licensed.
Applications available:
- Geodetic Conversions
- Solar Position Calculations
- Magnetic Variation
- Survey Network Adjustment Using Least Squares Analysis
- Grid to Grid Coordinates Shift
- Boxin Transponder Positioning
- Heading from Pitch and Roll
- Tidal Prediction for Standard Port and Co-tidal locations
- Transit Fix Position Check
- Ultra Short Base LIne System Calibration
- Speed of Sound in Water Calculation
- Anchor Catenary Presentation & Calculation

Geodetic Conversions
Various geodetic computations including grid to geographical conversion, datum shift, range and bearing computation.
Also available bulk conversion of co-ordinates.
(See geodetic)
Solar Position Calculations
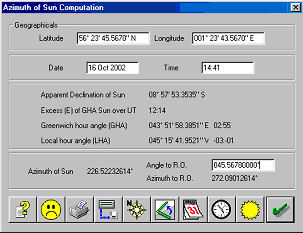
The software computes the azimuth to the sun from observations and using star almanac tables. This software can be used
to calibrate a gyrocompass.
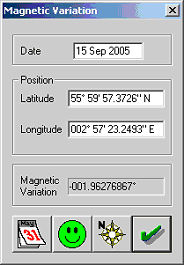
Uses the The International Geomagnetic Reference Field (IGRF) model to determine the components of the magnetic field
vector a given location.
The software uses least squares to adjust a network points using measured ranges, bearings and position 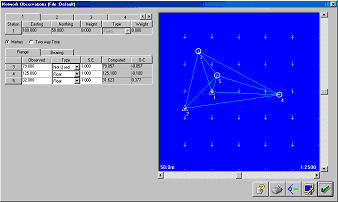 observations.
observations.
The software can be used for calibrating an acoustic network.
 The software computes the relationship between two grid systems and then allows the operator to convert between the two systems.
The software computes the relationship between two grid systems and then allows the operator to convert between the two systems.
Computation can be used for calibrating an acoustic network with a surface navigation system.
 To determine the position of a seabed transponder by observing acoustic ranges from a vessel sailing around the transponder.
To determine the position of a seabed transponder by observing acoustic ranges from a vessel sailing around the transponder.
The software uses sequential least squares to deterine the position so there is no limitation on the number of observations taken.
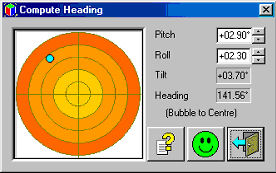 To compute and graphically display heading and tilt from pitch and roll readings
To compute and graphically display heading and tilt from pitch and roll readings
The software computes and displays the tidal curve based on a standard port and tidal harmonics all parameters 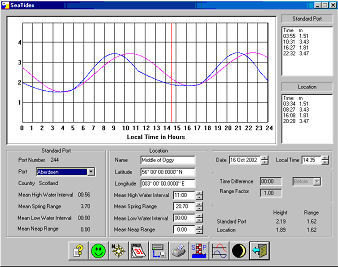 have been
have been
obtained from the UK Hydrographic Office.
Transit Fix
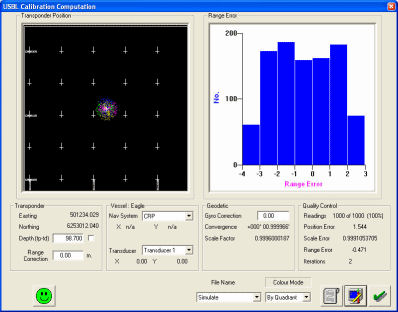
The software from observations computes the position of the legs of a 3 or 4 leg structure and also the centre. USBL Calibration
![]() The software is used to calibrate an USBL navigation system, the software will compute the likely errors in range, alignment, pitch
The software is used to calibrate an USBL navigation system, the software will compute the likely errors in range, alignment, pitch
and roll
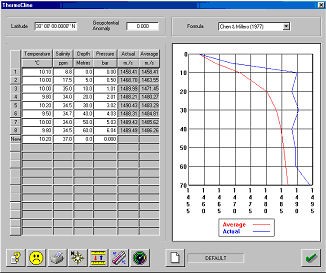 The software can use the following formulae to compute the velocity of sound in water.
The software can use the following formulae to compute the velocity of sound in water.
- Chen & Millero (1977)
- Del Grosso
- LeRoy
- MacKenzie
- Medwin
- Wilson(full and simplified)
- Woods.
The software also has the ability to produce velocity profiles from a series of points.
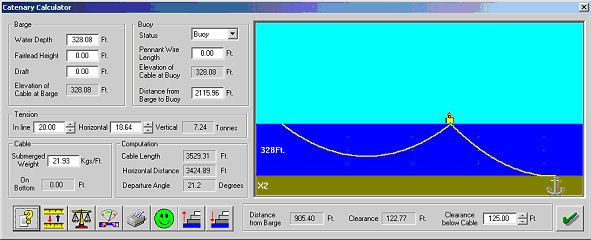 Anchor Catenary
Anchor Catenary
-
Simple Catenary
-
Buoy on Line
-
Tug mode
-
Variable water depth
-
Pennant wire length
-
Adjustable Clearance
-
Graphical Display
-
Cursor Measurement
-
Vertical Scale multiplier
For realtime catenary anchor monitoring see Norcom's CAMS system
 You can keep up to date on all the latest special offers, events and more via any of the following networking sites.
You can keep up to date on all the latest special offers, events and more via any of the following networking sites.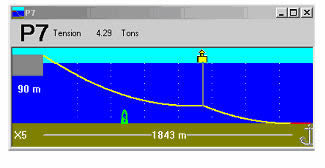{kind=link}